Segmentation
are ready to tackle the basic issue before us,
image
understanding.
What objects are in the image?
What is the meaning
(semantics) of the image?
An image is just an array of pixel brightness values,
these numbers do not reveal themselves as comprising
parts of objects,
objects or relationships
between
objects without a lot of work on our part.
The first step in the process of image understanding
is segmentation, the assocation of a segment label
with each pixel. Let P={(i,j), j=1..NR,i=1..NC}
denote the pixel locations. Then segmentation is
a mapping S:P->L, where L is a segment label set.
Usually L is taken to
be
the non-negative integers.
Eg:
0 0 0 0 0 0 1 0
0 0 0 0 0 0 0 0 0 0
0 7 8 7 6 8 0 0
1 0 1 1 1 1 1 0 0 0
0 7 7 8 7 8 0 0
0 0 1 1 1 1 1 0 0 0
0 6 8 9 8 7 1 0
0 0 1 1 1 1 1 0 0 0
0 7 7 7 6 7 0 0
0 0 1 1 1 1 1 0 0 0
0 0 1 0 0 0 1 0
0 0 0 0 0 0 0 0 0 0
1 0 1 0 0 0 0 0
0 0 0 0 0 0 0 0 0 0
0 0 0 0 1 9 8 9
9 0 0 0 0 0 2 2 2 2
0 0 0 0 0 0 8 8
8 0 0 0 0 0 0 2 2 2
Original Image Segmented image
0:
background
segment
1,2:
foreground
segmentS
The segmented image as
above is also called the label
image.
The goal of segmentation is to group together pixels
which are similar in some important way, and
distinguish groups of pixels which are different.
Then using the size, shape, and other characteristics
of these segments we may be able to build objects out
of the segments and match these objects with known
objects, making sense
out of the image.
Threshold-based
segmentation
The simplest sort of segmentation is into two segments,
called the object
segment (or foreground
segment)and the
background
segment, by comparing each
pixel value to a
fixed threshold T.
Eg:
Original image
Threshold-segmented label image
It is important to set the threshold T properly. If you
do not have domain knowledge specifying T, consider
the histogram of the image. If the object and background
brightness values tend to cluster in two compact sets,
the histogram will
be bimodal (two main peaks) and the
threshold can be
set in the valley
between the modes.
Eg:
In choosing the valley of the histogram, we are modeling
the histogram as
the sum of a foreground and
a
background
histogram. The
pixel classification errors
are
those to
the left of the
valley that are truly
foreground pixels
plus those to the
right that are background.
Eg: For a given image the threshold is selected at the
arrow.
The pixels that will be
misclassified are shown in
red. Note they are a small
fraction of all pixels.
A more rigorous approach is to find the
threshold that
minimizes the
probability of
misclassification under the
assumption that
the image consists of a sum
of two
populations
of pixels which are statistically defined:
foreground pixels
with
greylevel distribution which is
Gaussian with
mean m1 and standard deviation s1, and
background with
mean m2
and s.d. s2.
This
amounts
to
fitting
the
histogram with a
"Gaussian Mixture"
model then finding
out where the two
curves cross.
The area under the tail of the leftmost Gaussian
to the right of the threshold is Pr(error 1).
That under the tail of the rightmost Gaussian to
the left of the threshold is Pr(error 2). To
minimize the sum, put threshold where they cross.
To see that this
is the best threshold, note
that
if we use a
threshold which is set a little
to left
of the curve crossing we are adding more error 1
than subtracting
error 2. Same applies on the
other
side of the
crossing, adding a bit more
error2 than
we are reducing
error 1.
Due to uneven lighting, a good threshold in one
part of the image may not be good in another. Thus
can subdivide the image and do separate thresholding
in each subimage.
Regions where it is difficult to find a good threshold
(no valley, not bimodal), thresholds from neighboring
regions can be
interpolated.
Multiresolution
threshold segmentation
Multiresolution image processing algorithms operate
on several copies of the same image at different
resolutions (eg. image pyramids formed by 2x2 avg).
Top-down algorithms make a coarse estimate of
something near the top of the pyramid then refine it
as they descend
down. Bottom-up
or data-driven
algorithms
compute values at small
scales, then
combine the
values by averaging or refinement as
they
ascend up.
Multiresolution threshold segmentation works by
computing a threshold at a coarse level near the
top, then refining it by recomputing it in the
border region between segments on the next lower
level.
Threshold-based segmentation has limited usefulness.
Often, many of the pixel values within an object are
the same as in the background or another object. For
instance, a person might be weall a blue shirt and
be imaged against a blue wall. The regions need to be
distinguished by
shape rather than raw pixel
values.
Edge-based segmentation
methods
The idea here is to define the boundaries of segments
using edge detectors. The segment is then defined as
consisting of all the pixels inside the bounding edge.
Or there may be
multiple interior segments within one
larger one.
Recall that edge
detection is a differentiation-based
operation, and
that always increases noise. Thus
a major issue in edge-based segmentation is how to
"clean up" the set of edges so that they are simple
connected sets with an inside and an outside. There
are three major
problems to be addressed:
1. Edge thinning
2. Edge connecting
3. Elimination of isolated
small fragments
Thinning:
One approach is to use morphology
operators to be discussed later. Another is
to estimate the edge direction, then for each
candidate edge pixel:
1. Examine other candidate edge pixels
across edge profile (perpendicular to
edge direction).
2. Mark the maximum valued pixel as an edge
pixel
and
the
others
not.
Eg: Use a compass operator (eg. Prewitt, Sobel)
to get an edge image plus edge direction (N, NE,
etc.) at each pixel. Threshold to identify strong
candidate edge pixels. Then for each candidate
edge pixel, take max of it and its two connected
neighbors in direction of the maximum directional
derivative, mark that one
an edge pixel others not.
Connecting:
Single pixel breaks in edges can
be corrected by examining a 3x3 window centered
at each non-edge pixel. If there are unconnected
edge pixels in the window, mark the center an
edge pixel.
Eg: 0 1 0 0 0
0
0 0 0 0 0 1 0 0 0 0 0 0 0 0
0
0
1
0
0
0
0
0
0
0
0
0
1 0 0 0 0 0 0 0
0
0
1
0
0
0
0
0
0
0
0
0
1 0 0 0 0 0 0 0
0
0
1
1
0
0
0
1
1
1
0
0
1 1 0 0 0 1 1 1
0
0
0
0
0
0
1
0
0
0
0
0
0 1
0 0 1 0 0 0
0
0
0
0
1
1
0
0
0
0
0
0
0 0 1 1 0 0 0 0
0
0
0
0
0
0
0
0
0
0
0
0
0 0 0 0 0 0 0 0
0
0
0
0
0
0
0
0
0
0
0
0
0 0 0 0 0 0 0 0
0
0
0
0
0
0
0
0
0
0
0
0
0 0 0 0 0 0 0 0
A related approach is to use dual thresholds,
a method
called threshold
hysteresis.
Mark
all
pixels
with edge value > T1 as edge pixels, then
all pixels
> T0 (a lower threshold)
if they are
connected to
a marked edge pixel.
Recall that
this
2-threshold
strategy was also used in
the
Canny
edge
operator.
Elimination of isolated small edge fragments:
Thresholding of the edge image will remove the
weaker fragments due to noise. A bigger problem
is real edges but on a smaller scale than we
are interested in.
Eg:
From CityHall.jpg After Sobel Filter
One approach is to run an edge connector, then
zero out all edge fragments smaller than a
certain size.
CSE573 Fa2010 Peter Scott 05-14
Edge relaxation
Basic idea is to iterate on confidences of the
edge locations. As confidences go to 1 or 0, we
have an emergent edge map.
The edge locations most often used are called crack
edges, ie. edges between two 4-connected pixels.
A given crack edge has a vertex at each end.
There are four kinds of vertices: 0, 1, 2 and 3.
The label corresponds to the number of other crack
edges meeting our given crack edge at that vertex.
CSE573 Fa2010 Peter Scott 05-15
Eg:
Crack edge (3,4)-(3,5) has upper vertex of type0 and lower vertex of type 1. Left vertex of
(1,6)-(2,6) is of type 2 while right vertex of
(2,1)-(3,1) is of type 3.
A type n-m crack edge is one such that one vertex
is of type n and the other of type m. In the
example, the crack edge (2,2)-(3,2) is a type 1-3.
CSE573 Fa2010 Peter Scott 05-16
Iteration goes as follows. Initialize all confidences
of all crack edges in the entire images to values
between 0 and 1 based on available domain analysis,
preliminary processing or edge filter. Then for each
crack edge, alter its confidence according to its
type. Reinforce 1-1 crack edges the most, penalize
0-m crack edges the most. When you are done with all
crack edges, that terminates a single iteration of
the relaxation algorithm. Repeat. Continue until
relaxation coverges to 0 or 1 for all crack edges. That
is, the maximum absolute difference of any crack edge
from either 0 or 1 < threshold, maxi(min(|ci-0|,|ci-1|)<T.
CSE573 Fa2010 Peter Scott 05-16a
How do you decide the type of a vertex when you only
have confidences for the adjacent 3 crack edges rather
than sure knowledge of the neighboring crack edges?
There are formulas (5.13, p. 141) for deciding this
based on the three confidences. Basic idea is that if
you have, for instance, high confidence that two of the
three neighbors on one end have type 1 vertices and the
other you are confident is a type 0, you would increase
your confidence your crack edge has a type 0 vertex there
and decrease your confidence in the other types at this
vertex. Further details and extensions are discussed in
the text.
CSE573 Fa2010 Peter Scott 05-17
Border tracing
Edge based segmentation uses edges to define and/or
encode segments. Suppose we have labelled a segment,
assumed to be a connected blob. Finding its border
permits chain coding or other segment border coding
schemes to be applied.
Inner boundaries are connected sets of pixels which
are within the blob but are each adjacent to at
least one pixel outside the blob. Outer boundaries
are connected sets of pixels not in the blob, but
are each adjacent to at least one pixel in the blob.
Either can be used to characterize the border.
CSE573 Fa2010 Peter Scott 05-18
Eg:
Eg: 1-connected outer boundary pixels shown with
o's. Note that if you use 4-connectivity to define
adjacency between a candidate pixel and the interior
of the blob, you end up with an 8-connected boundary,
and vice versa. All six blob pixels are inner boundary
pixels.
CSE573 Fa2010 Peter Scott 05-19
Ideally, adjacent segments should share a common
border. With either inner or outer boundary borders,
this does not happen.
Extended border: roughly, shift the inner boundary
one-half pixel outward (details p 144-5 text).
Eg (continued):
 CSE573 Fa2010 Peter Scott 05-20
CSE573 Fa2010 Peter Scott 05-20
Graph search methods for border finding
Suppose we have the edge strength s(x) and the edge
direction Φ(x) for each pixel x = [i;j] in an
image. We can construct a directed attributed graph
in which the nodes are the pixels (attributed with
its edge strength). The arcs, representing candidate
border transitions, are entered according to a set
of graph connection rules. For instance, add an arc
from xn to xm iff:
I. They are 8-connected;
II. The gradient in xn points at xm plus/minus 45
degrees;
III. s(xn) and s(xm) are both > Ts, a strength
threshold.
CSE573 Fa2010 Peter Scott 05-21
Eg:
Now suppose we are seeking the best border between
pixels xi and xj. Define a cost function associated
with any path in the graph connecting xi and xj. The
problem becomes one of searching the graph for the
path of minimum cost beginning with xi and ending with
xj.
CSE573 Fa2010 Peter Scott 05-22
One method to search the graph is by exhaustive
enumeration. For each non-looping path connecting
the begin and end nodes, compute the cost and
select the optimal one.
For cost functions which are the sum of individual
positive node costs such as this, several powerful
algorithms can be used to reduce the computation time.
One is to use the A*-algorithm. This algorithm is
of the "shortest-path" class, and is widely used
in games and simulations as well as image processing.
CSE573 Fa2010 Peter Scott 05-22a
Call nA the start node and nB the end node.
Define the path cost at any node ni as the
sum of the cost from nA to ni plus an estimate
of the cost from ni to nB. Note: in estimate = 0,
this is referred to (as in the text) as the A-algorithm.
0. Let ni=nA and the the OPEN list be empty.
1. Expand ni and add its thusfar unvisited
successors to the OPEN list with pointers
back to ni.
2. Find the OPEN node ni of minimum overall
path cost, remove it from the open list.
Terminate successfully if ni=nB. Terminate
unsuccessfully if OPEN list is empty. Else
go back to step 1.
CSE573 Fa2010 Peter Scott 05-23
There is a step-by-step numerical example in the
text on p. 150 (Fig. 5.22). The numbers in a node
are the estimated costs from that node to the end
of the problem. See text for details.
Main aspects of Fig. 5.22 (see text for full figure)
The estimates used have a critical effect on the
properties of the algorithm. If the estimate of
the cost from ni to nB is zero (A-algorithm), it will
terminate in the optimal, minimum-cost path. Otherwise,
the algorithm may run much faster, but optimality is
not guaranteed.
The node costs may be taken to be constant (minimum
node-length path) or "inverse edge strength"
node cost at xi = (maximages(x)) - s(xi)
CSE573 Fa2010 Peter Scott 05-24
Other node cost choices include border curvature,distance from estimated border, distance from end
pixel.
There are various strategies for trying to keep
the size of the OPEN list small, including pruning,
branch-and-bound, and other heuristics. Multi-
resolution graph seaching can be very useful: get
an approximate solution at low-res, then kill all
nodes at high-res except those near the low-res
solution.
CSE573 Fa2010 Peter Scott 05-25
Border finding by Dynamic Programming
Suppose we have a monotonic and separable cost
function we are trying to minimize in traversing a
graph. Richard Bellman's Optimality Principle
observes that any portion of an optimal path is
itself optimal. In other words, if an optimal path
goes through ni and nj, then the portion of the
path between ni and nj is the optimal path (minimum
cost path) which connects these two nodes.
Applying this idea recursively to the terminal
portion of the optimal trajectory, we can construct
an algorithm which reduces the problem of N-step
optimization to many one-step optimizations. This
results in a dramatic computational reduction.
CSE573 Fa2010 Peter Scott 05-26
Eg: Find the optimal path which starts at node 2 and
ends at either node 15 or 16. The branch costs
(cost of moving between the nodes connected by
the arrow) are shown.
CSE573 Fa2010 Peter Scott 05-27
The cost-to-go function V(n) for any node n measures
the minimum cost path beginning at n and ending at
one of the goal states. If there is no such path,
mark the cost-to-go from n as infinity (or "x").
The Bellman Equation being used throughout states
that the cost-to-go from n equals the minimum sum
of branch cost from n to m plus cost-to-go from m,
minimized over all nodes m that can be reached in
one step from node n.
The branch costs in the Dynamic Programming algorithm
can be set to the node costs at the destination nodes
of the arrows, in which case the algorithm finds the
minimum sum of node costs solution. Other costs that
can be selected may include a node cost plus a cost
proportional to the difference in gradients between
the nodes, length of path between nodes, etc.
CSE573 Fa2010 Peter Scott 05-28
Note: the DP search can also be done in the forward
direction as described in the book. The backward DP
search as described above is usually preferred, as
it leads to a border map which tells us for each
possible start state, the optimal border from there.
Eg (continued):
CSE573 Fa2010 Peter Scott 05-29
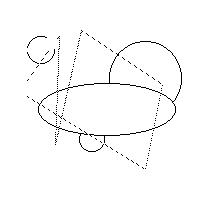
Hough Transform
If the size and shape of desired segments are known
in advance, but their location is unknown and their
edge boundaries in the image may be noisy or
partially occluded, the Hough Transform is a useful
tool for locating them.
Eg: Find all circles of unit radius and all
broken straight lines in this image.
 CSE573 Fa2010 Peter Scott 05-30
CSE573 Fa2010 Peter Scott 05-30
The Hough Transform was originally developed to find
straight lines in images. To find lines, we create
a parameter space image associated with the image
space image (input image).
Each straight line y = kx + q is characterized by
two parameters: the slope k and intercept q. Thus
each line in (x,y) space maps to, in other words
is in 1:1 correspondence with, a point (k,q) in
parameter space. So finding lines in (x,y) space
corresponds to finding points in (k,q) space.
CSE573 Fa2010 Peter Scott 05-31
Now each point (xo,yo) in (x,y) space might be part
of many possible lines, those satisfying yo=kxo+q
for all possible (k,q). In parameter space, this
describes the straight line q= -xok+yo. So points
in image space map into lines in parameter space.
These lines "pile up" at points in parameter space
corresponding to straight lines in the digital image we
are working with.
So to find lines in image space, we will map each image
point into a line in parameter space and see where
the accumulated value is high.
CSE573 Fa2010 Peter Scott 05-32
Hough Transform Algorithm for finding straight lines:
given a discete binary image,
1. Discretize parameter space into NKxNQ cells
called an accumulator array. Initialize each
cell in the accumulator array to zero.
2. For each foreground pixel in image space
determine the cells in the accumulator array
that the corresponding (k,q) line passes
through, and increment each of them by +1.
3. The peaks in the resulting accumulator array
correspond to detected lines in the original
image.
CSE573 Fa2010 Peter Scott 05-33
The slope-intercept parameterization of straight
lines has the bad property of not being able to
represent vertical lines. A better parameterization
is s-theta, where s is the distance from the origin
to the line and theta the angle of the line.
The formula for a straight line in image space in
terms of s-theta is
s = x cos(theta) + y sin(theta)
In this case each foreground pixel (xo,yo) in image space
maps into a sinusoidal curve
s = sqrt(xo^2+yo^2) cos(theta - arctan(yo/xo))
in (s,theta) parameter space. Line-finding is done
using an (s,theta) accumulator array as described
above.
CSE573 Fa2010 Peter Scott 05-34
Generalized
Hough
Transform
Any segment shape can be parameterized and
found
using the Hough Transform
the same way as lines.
Eg: Find all squares of
side length 4 pixels which
are aligned with the coordinate axes
.
Let's parameterize the square by (xulc,yulc),
the coordinates of its upper left hand corner.
So for a given foreground pixel p in the input
image, we will increment by one each cell in
an accumulator array that might correspond to
the ulc of a 4-square that p is part of.
Region-based segmentation
The third general approach to segmentation (counting
threshold-based and edge-based as the first two) is
to define as distinct segments sets of connected
pixels whose properties are sufficiently similar
to one another, and sufficiently dissimilar from
neighboll segments. This is region-based segment-
ation.
Formally, let {Ri, i=1...S} be a candidate
segmentation of an image and H:R->{true,false}
where R is any subset of pixels from the image
and H(R) true means R is sufficiently homogeneous
relative to some underlying homogeneity criterion
test. Then {Ri, i=1...S} is a successful segment-
ation if H(Ri)=TRUE and H(Ri U Rj)=FALSE for
every
i=1..S and (i,j) adjacent.
The similarity metric or homogeneity criterion
might be based on color, gray level, rate of
change of gray level, or some other scalar function
which determines how
similar two pixels are.
The order in which new pixels are recruited into
existing segments, or new segments started, has
much to do with segmentation performance. The main
ideas here are split, merge, and watershed
segmentation.
Merge
segmentation
Idea is to start with very small candidate segments
(regions) and merge them together. Typically, the
initial regions are single pixels or very small
groupings.
1. Define an initial region set {Ri} and a
homogeneity test H based on a homogeneity
measure
(e.g.
gray
level
similarity).
2. For i=1..Sk, for j=1..Sk adjacent to Ri,
if
H(Ri
U Rj)
is
true,
merge Ri
and Rj.
3. Iterate step 2 until H(Ri U Rj) is false
for
all
adjacent
regions.
Several possible H's for
merge segmentation are
discussed in the text.
Eg: Let h(R) be the histogram for region R. Define
the
homogeneity measure
S(R)
=
mean(h(R))/sd(h(R))
where mean and sd (standard deviation) are
computed considering the histogram h() as a
prob density fn. Then H(R)=TRUE iff S(R)>T.
Eg: Let S(R) = W/min(peri,perj), where W is the
count of weak crack edges between regions i
and j (|x(ni,mi)-x(nj,mj)|<Tw for crack edge
(ni,mi)-(nj,mj)) and perk is the perimeter
of
region k. Then H is true iff S(R)<T.
Merge segmentation, being pure bottom-up, tends
to suffer from "tunnel vision," it is not aware
of the surrounding regions and their properties.
Thus you tend to get a lot of small regions in
the end, or if the threshold is low, merging of
distinct regions together.
Idea is to start with very large regions, then
split them if they do not satisfy the homogeneity
test.
1. Build an image pyramid based on 4:1 avg.
Let level 0 be the top level, level n the
bottom
(full
resolution)
level.
Let
k=0.
2. Examine each cell Ri not marked CLOSED on
level k. If H(Ri)=TRUE, mark Ri as a distinct
segment and mark all descendent cells of Ri
CLOSED.
3.
Repeat 2. for k=0,..,n-1.
4. Label all not-CLOSED cells on level n as
distinct
segments.
Eg: Homogeneity test: H=TRUE if maximum gray level
difference between children is <4. 4x8 pixel
4
bit gray level image.
Level
0:
9
12
Level 1: 12 11 11
12
04
09
12
13
Since children of 12-cell on level 0 pass the
H-test, mark that region as segment 1 and mark
all
its descendant cells closed.
Level
0:
9 R1
Level 1: 12 11 CL
CL
04
09
CL
CL
Level 2: 12 11 05 10 CL CL CL CL
13
12
04
09
CL
CL
CL
CL
04
04
04
09
CL
CL
CL
CL
04
04
09
14
CL
CL
CL
CL
Two
of the four Level 1 cells pass the H-test.
Level 1: R2 11 CL
CL
R3
09
CL
CL
Level 2: CL CL R4 R5 CL CL CL CL
CL
CL
R6
R7
CL
CL
CL
CL
CL
CL
R8
R9
CL
CL
CL
CL
CL
CL
R10
R11
CL
CL
CL
CL
So we end up with 11 regions, largest being 16
pixels and the smallest 1 pixel big.
An obvious defect with split segmentation is that
adjacent regions on different pyramid levels can
be identical but will appear as distinct segments.
An algorithm that combines the advantages of both
split and merge region
building is the split-merge.
1. Preconditions: a homogeneity test H, initial
segmentation
and
a
standard
4:1
image
pyramid.
2. For each current region R if H(R)=FALSE split
into 4, if H(R')=TRUE where R' is the union
of the four children of one parent merge them,
if H(Ri U Rj)=TRUE for adjacent regions merge
them.
3.
Repeat step 2. until no further split-merges.
Variations to basic split-merge are discussed in
the text
(split-link,
single-pass split-merge).
segmentation called watershed segmentation.
A watershed ridge is a connected segment of local
maxima orthogonal to the ridge direction, ie.
one-dimensional profiles across the ridge all
exhibit local maxima there.
Watershed ridges divide catchment basins, regions
with downhill paths to a common local minimum in
the region (the catchment drain). Each catchment
basin constitutes a segment in watershed segment-
ation.
in current use work from the catchment drains up,
using a flooding operation to identify and fill
catchment basins. Let bmin be the darkest gray
level in the image. All bmin pixels are identified
and assigned segment numbers. Connected neighbors
are merged. Then bmin+1 pixels are similarly
assigned. Watershed are identified as "dams"
separating segments.
Matching
A final method of segmentation for known object
shapes is matching.
A
template
(matched
filter)
of
the object is constructed and positioned
at
location (u,v) in the
image. A match
criterion
C(u,v) is computed for
each (u,v) in the
image
and
the local maxima of C(u,v)
are thresholded
to
determine the matched
segments.
Eg: Find cross patterns 0
1
0 . Image is 4x10:
1
1
1
0
1
0
0 0 1 0 1 1 0 1 0 1
1 0 1 1 0 1 0 0 0 1
0 1 1 0 1 1 1 0 0 0
1 0 0 0 0 1 0 0 0 0
Lets use
C(u,v)=1/(#differences+1), where (u,v)
is the ULHC of the template
location. Then the
C(u,v) image is
1/5 1/3 1/8 1/4 1/6 1/7...
1/3 1/6 1/4 1/7 1
1/6...
...
Note:
you
are
not
responsible
for
Section
5.5
in
2nd ed
(6.5 in 3rd ed).
- End of Ch 5 lecture charts -