Note: in
morphology
the pixel (x,y) location corresponds
to the usual algebraic
x-y coordinate orientations, not
the usual image
coordinates:
Chapter 11: Mathematical Morphology
Morphology means "shape" or "form." Mathematical
morphology is a set-theoretic approach to changing
the shape of regions and segments of images. It
is a useful basis for the design of algorithms
for segmentation, as in Chapter 5. It is also
widely used for preprocessing, and for object
recognition and
higher-level algorithms as well.
Morphology for binary images
First we will consider only binary images. Later, we
will
extend morphology to gray
level and then color images.
For purposes of studying mathematical morphology, we
will
represent a binary
image as a point set, a subset of Z2,
where Z2
is defined as the
Cartesian product of the signed
integers, i.e. all pairs of signed
integers.
Elements of this point set correspond
to the foreground (black) pixels. Each pair of
integers defining a foreground pixel location in
the image can be thought
of as
a 2D vector as well.
Note: the convention
in morphology is that discrete
images are defined on Z2,
not on the Cartesian product
of
the
positive
integers as Matlab assumes.
Eg: A 512x512 binary image with one black line
running along its diagonal is the 512 member
pixel set {(0,0)...(511,511)}. The pixel
(10,10) can also be considered as the 2D
column vector x = [10;10]' .
Each morphological operation
is a binary
operation between the image and another point set
called the structuring element. The structuring
element is usually much smaller than the image
itself, and plays a role similar to the mask
in a small-kernel
convolution.
Eg: Structuring element B = {(0,0), (0,1)}.
Eg: Stucturing element B = the 3x3 square
{(0,0),(0,1),(0,2),(1,0),(1,1),(1,2),(2,0),(2,1)(2,2)}.
Before laying out the formalities, lets
informally look at the two most important
morphological operations,
dilation and erosion.
Dilation
Define the dilation of an image X={x} by the
structuring element B={b}
as the image Y={y}
Y = X (+) B = { y=x+b for each x in X, b in B }.
Note: (+) in these notes corresponds to the
operator represented by a + inside a circle
in the text. Similarly (-), etc. to be defined
shortly.
So for each x in the image X, we color black
all points that are of the
form x+b.
Eg: Consider the diagonal
line image X =
{(0,0),(1,1)..(511,511)} together with the
structuring element B = {(0,0),(0,1)}. Then
X
(+) B = { (0,0)+(0,0), (0,0)+(0,1),
(1,1)+(0,0),
(1,1)+(0,1),
(2,2)+(0,0),
(2,2)+(0,1),
.....
(511,511)+(0,0),
(511,511)+(0,1)
}
So the dilated or "thickened" image is a
diagonal image whose diagonal line has
thickened from one to two pixels wide.
Note: in morphology the pixel (x,y) location corresponds
to the usual algebraic x-y coordinate orientations, not
the usual image coordinates:
So in morphology image notation, pixel location (a,b)
means horizontal index (col) a, vertical index
(row)
b.
We will use this convention throughout our discussion
of morphology (Ch 11 of the text).
Eg cont'd: Y = {(0,0),(0,1),(1,1),(1,2),..(511,511),(511,512)}
For each x (col) value there are two y (row) foreground
pixels in Y, ie. we have thickened X vertically.
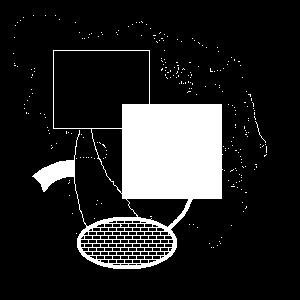
In Matlab, use the imdilate
function to produce dilation.
Eg: >> B
=
ones(4);
>>
BWD = imdilate(BW,strel(B));
>>
imshow(BWD)

Original Image
BW
Dilated
by
B
Dilated by B
twice Dilated by B
three times
The shape of the structuring element determines what
direction the image dilates, the size determines how
fast.
Eg: B1={(0,0),(0,1),(0,2),..(0,7)}
B2={(0,0),(1,1),(2,2)...(7,7)}
Erosion
Define the erosion of an image X={x} by the
structuring element B={b}
as the image Y={y} where
Y
= X (-) B
=
{y
such
that
for every b in B, x=y+b is in X }.
So for each y in Z2, we check whether y+b is a foreground
pixel in X for every b
in B. If so, we color y black
in Y.
Eg: X = {(1,1),(1,3),(2,3),(3,5),(3,6),(4,6),(5,7),(6,7)}
B
=
{(-1,0),(0,0)}
Note that since (0,0) is in B, then y+(0,0) must
be
in X in order that y be in Y, ie. if the origin
(0,0)
is in
B, the only candidates for Y are those
already
in X.
For (1,1) to be in Y need (1,1)+(0,0) and
(1,1)+(-1,0) to both be in X. Not the case.
For
(1,3) to be in Y need (1,3)+(0,0) and
(1,3)+(-1,0) to both be in X. Not the case.
First one that works is (2,3), since both (2,3)
and
(1,3) are in X.
Y
=
{(2,3),(4,6),(6,7)}
In the previous example with B={(0,0),(-1,0)} an image
point in X "survives" the erosion only if there is
another image point on its left. So for instance, a
black vertical line n columns wide erodes to n-1 cols
after one erosion, n-2 after two, etc.
Note repeated: in
morphology image notation, pixel location
(a,b) means horizontal index a (col a), vertical index
b
(row b counting positive upward).
With B={(-1,-1),(-1,0),(-1,+1),(0,-1)...(+1,+1)}, ie.
the point (0,0) and its eight nearest neighbors, a
point survives erosion by
this B only if all
of its
eight-neighbors are in X.
Thus with this
structuring
element, pixels on the
boundary of a
blob melt away, or
erode away, when the
erosion operation is performed.
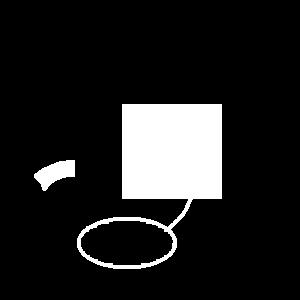
Eg: >> B
=
ones(3);
>>
BWE = imerode(BW,strel(B));
>>
imshow(BWE)

Eroded image
BWE Twice-eroded: add the code line
>> imshow(imerode(BWE,strel(B))
In
this
example,
a
foreground
pixel
"survives"
an
erosion only if there is a 3x3 square of white
pixels below it and to its right. So the diagonal
lines thin from an original thickness of 4 pixels
to 1 pixel with the first erosion, then disappear
with the second erosion.
Erosion and dilation can be used to perform many
useful image processing tasks. They can be used
together and in combination with standard binary
set operations such as set difference:
X
/
Y
=
X
and
Yc
Eg: Erosion followed by set difference yields the
interior boundary.
>> IB = BW & ~BWE;
>>
imshow(IB)
Similarly, dilation followed by set difference
yields the exterior boundary.
>> EB = BWD & ~BW
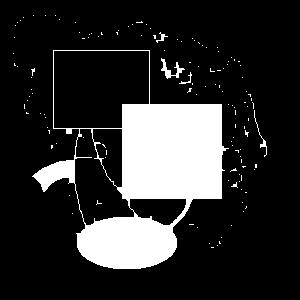
Erosion followed by dilation is called opening.
Opening breaks weak
connections between blobs. It also
eliminates small
features while leaving larger ones
unchanged.
Eg:
>> SE=strel(ones(3));
>>
BWO=imdilate(imerode(BW,SE),SE);
>>
imshow(BWO)
Original
image BW BW after
opening operation
Eg: Dilation followed by erosion is called closing.
Closing connects up distinct blobs that are near
one another, also smooths out rough boundaries.
>> BWC=imerode(imdilate(BW,SE),SE);
>>imshow(BWO)
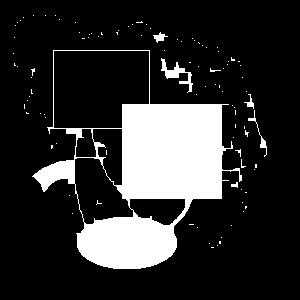
BW closed by
SE=ones(3) BW closed by SE=ones(7)
Note how the isolated
fragments are glued together by
the closing operator. But
bigger objects are not
changed, note the lack of
distortion of the big blobs.
Graphical notation for representing images andstructuring elements
Mark each image point with a dark square, and mark
the origin (0,0) with an X ("ex").
Eg: B1={(1,1),(-1,1),(1,-1),(-1,-1)},
B2={(0,0),(1,0),(2,0)}
CSE573 Fa2010 11-13Recall that the first index is the column index and the
second is the row index. Columns increase to the right,
rows increase upward.
Dilation: for each (i,j) in input image X,1. Align ex in B with (i,j)
2. Mark each y under a dark square in B as a dark
square in Y, i.e a pixel in the dilation Y=X(+)B.
Erosion: for each (i,j) in ZxZ,
1. Align ex in B with (i,j)
2. If every dark square in B is aligned with a
dark square in X, them mark (i,j) as a dark
square in Y, i.e. a pixel in the erosion Y=X(-)B.
Eg: Using B1 and B2 above,
Other definitions and formal properties:Eg: G={0..255}. Using X and B above, let
A morphological transformation psi is a mapping
psi:X->Y where X and Y are point sets (subsets
of ZxZ). Quantitative transformations psi have
four explicit properties described in the text.
All the morphological transformations we shall
study are quantitative.
The dual of a morphological transformations psi
is defined as the psi* such that for all X,
psi*(X) = [psi(Xc)] c
Eg: erosion and dilation are dual operations,
as are opening and closing.
CSE573 Fa2010 11-15
Properties of dilation:
1. Commutivity: X(+)B=B(+)X
2. Associativity: X(+)[B(+)D]=[X(+)B](+)D
3. Translation invariance: Xh (+)B=[X(+)B]h
Note subscript means translation by h.
4. Increasing: X contained in Y implies
X(+)B contained in Y(+)B
5. Extensive if (0,0) in B: X(+)B contains X
CSE573 Fa2010 11-16
Properites of erosion:
1. Not commutative: X(-)B~=B(-)X
2. Not associative: [X(-)B](-)D~=X(-)[B(-)D]
In fact, [X(-)B](-)D=X(-)[B(+)D]
3. Translation invariance: Xh(-)B=[X(-)B]h
4. Increasing: X contained in Y implies
X(-)B contained in Y(-)B
5. Anti-extensive if (0,0) in B: X contains X(-)B
CSE573 Fa2010 11-17
Gray-scale morphology
So far we have defined all psi-operations
(eg. dilation, erosion, opening and closing)
only on binary images, those that can be
represented by unattributed point sets in ZxZ.
In the case of gray-scale images, we define
an image to be a pointset from ZxZxG, where
G is the set of possible gray-scale values.
G can be {0..255} for 8-bit images, [0,1] for
real images, or even {0,1} for binary images.
Thus gray-scale images are sets of triples, not
doubles as for binary images.
CSE573 Fa2010 11-18
Eg: X={(1,-1,114),(2,-1,128),(3,-1,101),(2,-2,74)}
B={(0,0,62),(1,0,55)}
Gray-scale Dilation : Let x(i,j) be the gray level
at (i,j) in the input image X. Then Y is the
gray-scale dilation of X iff
y(i,j)=max [x(i-n,j-m)+b(n,m)]
where the max is taken over all (n,m) in the
support of B and (i-n,j-m) in the support of X.
Notes: 1. (n,m) in the support of B means
that B(n,m) is not equal to 0.
2. If G in X is bounded then y inherits
the same bounds on G.
CSE573 Fa2010 11-18
CSE573 Fa2010 11-19
Gray-scale Dilation: geometric interpretation
In 11-14 above we introduced a way of computing
dilation and erosion geometrically. Here is that
approach extended to gray-scale dilation:
1. Flip B left-right and top-bottom around its
origin, the pixel marked with an ex. Call this
new structuring element B' (B'(i,j)=B(-i,-j)).
2. Align B' with the original image so that
the origin ex in B' is over some arbitrary
pixel (i,j) in the original image. Then the
corresponding pixel (i,j) in Y will be non-
zero if and only if some non-zero pixel in
B' is aligned with a non-zero pixel in the
original image. Its value will be the maximum
sum of pairs of aligned pixels.
CSE573 Fa2010 11-19a
Eg: See the example above. B' corresponds to B
above except the pixel of value 55 is to the
left of the pixel marked with "X" and 62.
Then if, for instance, we align B' so that
its origin is over the pixel of value 101,
which is at (i,j)=(3,-1), we will have
Y(3,-1)=max(55+128,62+101)=183
And if we align it over (i,j)=(3,-3) we will
have Y(3,-3)=0 since neither non-zero value
in B' is aligned with a non-zero value in
the original image. Proceeding this way we
can align with all pixels (i,j) and compute
the gray-scale dilated image Y.
CSE573 Fa2010 11-19b
Gray-scale Erosion: for each (i,j) in ZxZ,
y(i,j)=min [x(i+n,j+m)-b(n,m)]
where the min is taken over all (n,m) in the
support of B.
Notes: 1. As before, y inherits G's bounds.
2.(n,m) is in the support of B iff
B(n,m) ~= 0.
Geometrically, align B with the original image sothat the origin ex in B is over some arbitrary
pixel (i,j) in the original image. Then the
corresponding pixel (i,j) in Y will be the minimum
difference of pairs of aligned pixels.
Eg: Using X and B above, let Y = erosion of X by B:
There is an interpretation of gray-scale morphology
operations in terms of the umbra and top
surface structures. The resulting operations
are identical to those described algebraically.
above.
Define the umbra U of a gray-scale image X=(x,y),
x in R2 and y in R1 , as the point set in R3 which is
bounded above by X, ie.
U(X)={(x,y') for (x,y) in
X and
y'<=y}.
Also define the Top Surface T of a gray-scale image
X as the point set in R3 which
bounds X from above,
T(X)={(x,y) in X such that for all (x,y')
in X, y>=y'}
Then the 3D-geometric interpretation of the gray-scale
dilation Y of X by B is that it is the top surface of U(Y),
where U(Y) is the binary dilation of U(X) by U(B).
Note this is binary dilation in R3.
The construction of the gray-scale dilation Y of X using
the structuring elemement B and following
this interpretation
goes like this:
1. Construct the umbras U(X), U(B).
2. Align the ex in U(B) with a element of U(X).
3. Mark all cells occupied by U(B) cells as
U(Y) cells.
4. Repeat 2 and 3 for all elements of U(X),
yielding U(Y).
5. The top surface of U(Y)
is the desired dilation.
Example: using the same X and B as before,
First align (0,0,0) of U(B) with (1,-1,0) of U(X). Mark
all U(X) cells which are covered by U(B) cells, namely
the 63 cells (1,-1,0)..(1,-1,62) and the 56 cells (2,-1,0)..
(2,-1,55), plus all cells below these cells, as belonging
to U(Y).
Next align (0,0,0) of U(B) with (1,-1,1) of U(X). Repeat.
Get two additional cells in U(Y): (1,-1,63)
and (2,-1,56).
Keep going like this. End up with the U(Y) shown in top
view as
To get the top surface, just strip away all cells except
those with the highest y-values for any x in U(Y). This is
the gray-scale dilation of X by B.
A corresponding procedure works for constructing the
gray-scale erosion of X by B:
1. Construct the umbras U(X), U(B).
2. Align the ex in U(B) with a cell (i,j,k).
3. If every cell in U(B) is aligned with a cell in U(X),
mark cell (i,j,k) as an element of U(Y).
4. Repeat steps 2 and 3 for each (i,j,k) in R3
yielding U(Y).
5. The top surface of U(Y)
is the desired erosion.
The 2D-geometric interpretation or the 3-D geometric
interpretation lead to algorithms of similar
computational
complexity. Of course, the resulting erosions
and dilations
are identical whichever is used.
Other gray-scale
morphological operations:
Opening and closing are defined identically to binary case,
but the "overloaded"
erosion/dilation operators are in this
context interpreted as gray-scale erosion/dilation.
Opening: [X(-)B](+)B
Closing:
[X(+)B](-)B
where
(-)
and
(+)
are
grey-scale
operations
We know that binary opening kills small foreground blobs
and breaks weak links between blobs.
Gray-scale opening is
a "soft" version: it darkens small blobs and
narrows weak
links. Similarly, gray-scale closing
brightens small blobs
and creates links between near-by blobs, and
brightens
isolated blobs.
Top-hat transformation
Recall that we defined the set difference X\Z as the
elements of X that were not in Z, X\Z = (X and Zc).
The top-hat transformation is the set difference
between an original image X and its opening,
ie
Top-hat: X\{[X(-)B](+)B}
Since opening an image eliminates small regions of
high local contrast, the Top-hat transformation finds
such small regions and eliminates the background. So
slowly varying background behind bright (or dark)
objects is eliminated.
Skeletons and other
morphological descriptors
Binary objects with complex shapes can often be
represented by simple skeletons. Skeletons capture the
shape of an object, but in a more compact form than
the full object itself.
Define a ball B(p,r) as a set of points {x} in a binary
image such that d(p,x)<=r. The distance metric used
determines the shape of the ball.
Eg: p=(10,10), r=3.
A maximum ball of a connected binary set (object) X
is a ball B contained in no other ball in X.
The maximum-ball skeleton S(X) of X is the set of all
centers p of maximum balls B(p,r) in X.
Eg: 8-connected maximum-ball skeletons of the black
objects shown as empty
squares.
Note: in these
examples, the empty
squares
were all originally
black, ie. are parts of
the
object.
A problem with the maximum ball skeleton S(X)
is that
if the object X is not convex, its maximum ball skeleton
S(X) may consist of disconnected segments. Homotopic
skeletons
are
skeletons which preserve the desirable
property of connectedness. Homotopic
skeletons can be
produced using the thinning operator X(/)B.
Define the Hit-Or-Miss Transformation (x) of X relative
to a pair of
structuring elements
(B1,B2) as
X(x)B
=
{x
in
X(-)B1 and Xc(-)B2}
where B=(B1,B2).
In other words, a point x survives (x) if, when you
align the origin of B1
at x, all
points of B1 match
X points, and when you
replace B1
by B2, no
points of
B2 match X
points.
Now lets define
thinning and
thickening in terms of (x):
Thinning (/): X(/)B = X\(X(x)B)
Thickening (*): X(*)B
= XU(X(x)B)
In other words, we find the pointset in X that perfectly
matches B, X(x)B, and remove it from X to get the thinned
version X(/)B, or add it to get the thickened version
X(*)B. If B2 is not empty, then the perfectly matched
portion X(x)B will be on the boundary of X.
Using a sequence of thinning operators with different
orientations, we can reduce the thickness of an object
uniformly. Continuing to do this until no further
pixels are lost, we have the homotopic skeleton.
See text p 579-8 for details.
Quench function
Give the maximum-ball skeleton of an object, if we
knew the size of the maximum ball for each skeleton
point we could reproduce the original object exactly.
Let S(X) be the maximum-ball skeleton of a binary
image X and p be a point in S(X). Define the quench
function qx(p) as the size of the maximum ball in
X at p. Then X can be reconstructed from
(S,q) by
X = U [p + qx(p)B]
where the union is over all p in S(X).
Eg:
One important use of the quench function is to define
the ultimate erosion of an object. If one tries to
iteratively erode a figure to get a skeleton, problem
is that parts of the skeleton disappear too. This is
particularly a problem for non-convex objects.
The ultimate erosion of X is defined as the union of
all the regional maxima of the quench function.
The regional maxima {Mi} are connected regions of
uniform gray value such that all neighbors of Mi
have strictly lower gray value (note that
gray value
refers to the value of the quench function).
So the ultimate erosion consists of high flat
ridges and plateaus in the maximum-ball
skeletons.
Eg: Ultimate erosion shown in black
Granulometry
Given an image containing a set of blobs, it is often
of interest to tabulate blob size
distributions.
Eg: In an image of oil droplets from an automobile
engine, we want to determine the distribution of
sizes of metal shavings. We may measure size by
area, by chord length,or
some other way.
Eg: In an image of particulate matter captured from a
"clean room" for VLSI chip manufacture, we may
need to certify how many particules >50 micrometers,
between 20 and 50
micrometers, <20 micrometers.
The blob count as a function of blob size is called the
granulometric curve.
Eg:
The granulometric curve can be computed by segmenting the
image, then computing the desired size metric for each
segment separately. But this is very computationally
expensive, particularly for images with many
blobs.
Morphologic approach to
the granulometric curve
Consider a set of increasing, anti-extensive openings
{psin, n=1,2...}. This set of openings is called a
granulometry
.
For each opening psin, assume we
will use the same
structuring element for both the erosion and
dilation
parts of the operation. Call the common
structuring
element Bn. Typically Bn
is just a scaled version
of Bn-1.
As we iteratively open an image
with {psin, n=1,2...},
the original
blobs get smaller and eventually disappear.
Label each pixel p in each blob with the n at which
that pixel disappears from its blob. The resulting
gray scale image is called the granulometry function
Gpsi(X).
Note: In visualizing the opening operation, there is a
useful geometric interpretation. The opening X(-)B is the
footprint of B as it is translated everywhere inside each
blob in X in which it fits.
Eg: Let Bn be an nxn square
structuring element.
The next opening, X(-)B1(-)B2(-)B3(-)B4, is empty.
So lets create the granulometry function Gpsi(X):
The histogram of this image is the granulometry curve
of the original image X with respect to the granulometry
{psin, n=1,2...}. Often this histogram is relabelled to
indicate structuring element Bn size on the horizontal
axis and pixel count divided by the size of Bn on the
vertical.
Eg (continued):
Note on the right graph that the area of Bn is greater
than the area of the particles that disappeared using
Bn. So this means that there are ~5/2 particles of
size 1-3 pixels, ~10/9 particles of size 4-8 pixels
and ~9/16 particles of size 9-15 pixels.
Morphological
segmentation
Segmentation is particularly difficult when you are
working with many distinct but similar objects, such
as a bowl of gumballs, a honeycomb, or a soap-bubble
foam. For such gray scale images, segmentation by
watersheds works well. Binary images can be converted
to gray scale for this purpose using the distance
function distX(p).
Let X be a binary image and B a structuring element.
For each point p in X, define the distance function
distX
:X->Z by
distX (p) = min
{n such that p not in X(-)nB}
In other words, for each pixel mark that pixel by the
number of times opening by B must be done before p
disappears from X.
Note the similarity between the distance function and the
quench function described earlier. The quench function is
the distance function defined on the maximum-ball skeleton
when the unit ball structuring element is
chosen.
The idea here is to use the negative distance function
-distX(p) as a gray scale image and do the usual watershed
segmentation on that image. That is, fill catchment basins
from the bottom of the lowest one. Where two basins touch
at equal values of gray scale, mark a "dam" or segment
boundary between them (see Section 5.3.4).