Image Pre-preprocessing
Goals of Pre-processing:
1. Noise and clutter reduction.
Noise: random errors in pixel values
Clutter: unuseful image components
2. Imaging model compensations.
Geometric distortion, color imbalance, graylevel
distortion, fixed pattern distortion.
3. Feature enhancement.
Edge enhancement and smoothing, histogram
equalization, falsecolor coding.
Pre-processing tends to be local and hardwired.
Local: mapping at (i,j) depends only on
values near (i,j).
Hardwired: not content, context or task
dependent. Invariant.
Pixel brightness
transformations
Due to different sensitivities of each pixel in the
camera to the light
that hits it,
f(i,j)
=
e(i,j)
g(i,j)
where g is the ideal scene brightness, f the recorded
image brightness, and e a matrix of error
coefficients.
e(i,j) is called pattern noise. Easiest way to
determine pattern noise is to view a uniform scene
such as a white sheet
of paper. Then g(i,j)=c and
e(i,j)
=
f(i,j)/c
Pattern noise can be compensated by differential
scaling of each pixel
fp(i,j) = f(i,j)/e(i,j)
This can be done with
a LUT and dedicated multiplier
LUT(i,j) = e-1(i,j).
Grayscale
transformations
Let P be a set of scalar pixel graylevel values
(P=[0,1] or R1 or {0...255} etc.). Then T:P->P
is a grayscale transformation. T maps each graylevel
to a new graylevel separately and
independently.
Egs:
equalization. The goal of histogram equalization
is to have an equal number of pixels at each
graylevel in P, the set of permissible graylevel
values. A histogram equalized image uses the
P as efficiently as possible, maximizing the
entropy of the image.
First count the pixels residing at each of the G
possible graylevels in the input image. This is the
histogram.
Then
compute
how
to
reassign
pixel
values
so that the histogram is as spread out as possible.
The algorithm is given in the text on p 61:
T(p)
=
round(((G-1)/NM)Hc(p)), p=0,...G-1
where the image is NxM with G grey levels
0..G-1, Hc(p)
is the cumulative histogram and T(p)=q
means
reassign
the pixels of grey level p in the original
image to
grey level q in the equalized image.
A cumulative histogram for each k
sums all the values
in the (normal) histogram for greylevels
less than or
equal to k.
Eg:
T(0)=round((7/100)Hc(0))=round(0)=0,
old
0
pix
->
0
pix
T(1)=round((7/100)Hc(1))=round(.7)=1, old 1 pix -> 1 pix
T(2)=round((7/100)10)=round(.7)=1,
old 2 pix -> 1 pix
T(3)=round((7/100)10)=round(.7)=1,
old 3 pix -> 1 pix
T(4)=round((7/100)27)=round(1.89)=2,
old 4 pix -> 2 pix
T(5)=round((7/100)49)=round(3.43)=3,
old 5 pix -> 3 pix
T(6)=round((7/100)74)=round(5.18)=5,
old 6 pix -> 5 pix
T(7)=round((7/100)100)=round(7)=7,
old 7 pix -> 7 pix
Eg (cont'd):
Notice that the histogram equalization is not
perfect (each bin having equal occupancy would
be perfect). But there is better use of
contrast
since the pixels are more spread out in
greylevels.
Geometric
transformations x'=Tx(x,y), y'=Ty(x,y)
Changes in scale, shifts and rotations of images
can be done using geometric transformations Tx,
Ty called affine transformations:
[xp;yp]=T*[x;y]+[a0;b0]
Note: where plain rather than bold face is used
as above this signifies Matlab notational
conventions are
being used.
Eg: Rotate image by 30 degrees ccw and shift
resulting image 2 pixels
to the right.
T=[cos(pi/6) -sin(pi/6); sin(pi/6) cos(pi/6)]
a0=0
b0=2
To rotate the image cw, use negative angle. To rotate
around point (x0,y0) rather than (0,0),
1. Shift image by (x0,y0): T=I, a0=-x0, b0=-y0
2. Rotate: T=[cos -sin; sin cos], a0=b0=0
3. Shift back: T=I,
a0=x0, b0=y0
Interpolation
A difficulty with geometric transformations
is that in general the transformed image
locations (x',y') are not on equi-spaced
grid points (raster) that the original
image samples (x,y)=(i*deltax,j*deltay)
were. We compute the new values on this
raster by interpolation.
Let (x',y') be a point on the raster whose
transformed value we wish to compute. Let
[x;y] = T^-1*([x';y']-[a0;b0])
be the coordinates of this point back in the
original image. Now we will interpolate the
neighboring raster values in the original
image to get the
value
at (x',y').
Eg: 30 degree cw rotation around x=y=0, with
image raster
(x,y)=(i,j),
i=1..NR, j=1..NC
T=[.866
.500;
-.500
.866]
Lets compute for instance the value of the
rotated image at the
raster point (4,2).
T^-1*[4;2]=[2.46;3.73]
So we want to interpolate to find the value
of the original image at (x,y)=(2.46,3.73).
Assume that in the original image, the
surrounding gray level
values are
gs(2,3)=115, gs(2,4)=144
gs(3,3)= 82, gs(3,4)= 65
Now there are several interpolation rules we
can use. Nearest neighbor interpolation assigns
to the unknown point the value of the closest
raster point. In the example this would be
f1(x,y)=gs(round(x),round(y))=gs(2,4)=144.
gs1(x',y')=f1(x,y)
Here gs(x,y) is the original sampled image
defined for raster values of (x,y), f1(x,y)
are the values of the original image off the
raster, and gs1(x',y') is the transformed
image defined for raster values of (x',y'),
and round(x) rounds
to
nearest integer.
Linear interpolation assigns to the unknown point
a weighted average of the values of the four
nearest neighbors as follows: let a=x-floor(x),
b=y-floor(y). Then
f2(x,y)=(1-a)(1-b)gs(l,k)+(1-a)(b)gs(l,k+1)+
+(a)(1-b)gs(l+1,k)+(a)(b)gs(l+1,k+1)
In this formula, l=floor(x) and k=floor(y). As
before, gs1(x',y')=f1(x,y) sets the transformed
value on the raster point (x',y'). floor(x)
rounds down.
Eg (continued):
Interpolating the point (x,y)=(2.46,3.73)
using linear interpolation, we have a=.46,
b=.73, l=2, k=3 and
f2(x,y)=.54*.27*115+.54*.73*144+
+.46*.27* 82+.46*.73* 65
= 105.54
If this is a uint8 image, we would quantize
to graylevel 105.
Note that the two different interpolation rules
lead to quite different results: 144 vs. 105.
Linear leads to smoother transitions, nearest
neighbor interpolation is faster.
There are other more accurate interpolation methods,
for instance bicubic interpolation (text eqn. 4.23).
This method uses a non-linear average of 16 pts. For
most imaging tasks, linear interpolation works ok.
For high-precision work such as special effects for
the movie industry, bicubic interpolation
is
done.
Local preprocessing:
filters
One useful class of preprocessing operations is to
multiply the image pixels by mask values and sum
over the mask.
Eg: Mask h: 1 2 1 (*1/20)
Image g: 1 1 1 1
2
4
2
1
6
1
1
1
2
1
0
1
0
1
1
1
7
0
Mask origin: h(2,2)
First step: Zero-pad
the image so mask fits
over every pixel. That is, add row/columns
of zeros borders to the
given image so that
when the mask origin is
aligned with any pixel
in the image, the mask
pixels do not extend
beyond the zero-padded
image.
In the case of a 3x3 mask with mask origin in
the
center of the mask, the border needs only
to be zero-padded by a
single row/column all around.
Padded
image: 0 0 0 0 0 0
0
1
1
1
1
0
0
1
6
1
1
0
0
0
1
0
1
0
0
1
1
7
0
0
0
0
0
0
0
0
Second step: Repeat for
each pixel (i,j) in the
original image (not the
zero-border pixels):
center the mask over
(i,j) in the original image
and compute the
sum of products of
(mask
values * aligned pixel values)
Enter this value
into pixel (i,j) in the
new "filtered" image.
Final image f: 14 22 17 9 (*1/20)
20
34
24
11
13
28
28
14
7
22
32
16
This multiply-sum-shift operation is called
convolution of the image by the mask (convolution
kernel). The result is called a filtered version
of the original image. For each pixel (m,n) in the
image g(m,n) to be filtered using mask h(k,l), the
filtered image f(i,j) is given by
The amount of zero-padding that has to be done depends
on both the size of the mask and where on
the mask the
mask origin is located.
Eg: Previous example, 3x3 mask with origin
in center,
need to zero pad with a
single
row or column on all
four sides of the image:
0 0 0
0 0 0
0 1 1 1 1 0
0 1 6 1 1 0
0 0 1 0 1 0
0 1 1 7 0 0
0 0 0 0 0 0
Using a 3x3 mask with origin in ULHC, zero padded
image
would look like this:
1
1
1
1
0 0
1
6
1
1
0 0
0
1
0
1
0 0
1
1
7
0
0 0
0
0 0 0 0 0
0
0
0
0
0
0
Using a 4x4 mask with
origin in ULHC, zero padded
image would look like
this:
1
1
1
1
0 0 0
1
6
1
1
0 0 0
0
1
0
1
0 0 0
1
1
7
0
0 0 0
0 0 0 0
0 0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
With properly chosen convolution kernels, smoothing
filters, sharpening filters, band-pass filters, and
many other kinds of useful filters may be produced.
Smoothing filters
Used for noise reduction. If the kernel coefficients
all have equal values, this is an averaging filter.
These are good at decreasing salt-and-pepper noise
(impulse noise) but blur out edges. To preserve
average brightness, the mask should sum to
one.
The Gaussian filter coefficients are quantized
versions of the Gaussian ("Normal") density function
Gaussian filters weight nearby pixels more, leading
to better edges than averaging filters of the same
mask size, but with less smoothing of local
noise.
Eg:
Noisy checkerboard test image
Filtered with 10x10 Gaussian mask
Fitered with 10x10 averaging mask
Nonlinear smoothing
Linear smoothing
like the filter operation described thus
far blurs
edges. Nonlinear methods are designed to avoid
averaging over edge
pixels.We will next consider several
nonlinear filters of
this type.
Averaging with
limited
data availability
1. Censored averaging:
The idea is to adaptively limit the scope of averaging
so that edges are not included in the average. To do
this we will define a noise band N = [min max], and
make the mask values depend on the data in the mask.

where h(i,j,m,n) is the mask coefficient weighting g(m,n)
in the calculation of the filtered value f(i,j).
1. if g(i,j) is not in N, h(i,j,i,j)=1, otherwise
h(i,j,m,n)=0 (ie, f(i,j)=g(i,j)).
2. if g(i,j) is in N, h(i,j,m,n)=1/q for
each g(m,n) not in N, h=0 otherwise.
Here
q
=
number
of
pixels
not
in
N.
Eg: 3x3 mask, mask origin (1,1), N=[224,255]
10 255
10 12 ... 10 15
10 12 ...
255 226
18 16 ... 16 15
18 16 ...
16
12 18 16 ... 16
12 18 16 ...
19
14 13 13 ... 19
14 13 13 ...
.................... ..................
ULHC of original
image ULHC of filtered image
2. Inverse gradient averaging: set each h(i,j,m,n)
inversely proportional to the invalidity measure
max{|g(i+m,j+n)-g(i,j)|,1/2}.
3. Rotating mask averaging: for each pixel (i,j),
find the most homogeneous rotated mask containing
that pixel, average over that mask.
Median Filters
The mean is sensitive to very large and very small
values. This will blur edges if there are edges in
an mask and simple averaging is done.
The median is not sensitive to outliers and thus
is a better edge preserver.
Let S = {s1..sn} where s1<=s2<=..<=sn. Then
s[(n+1)/2] is called the median of S. Here [x]
means the integer part of x.
Median Filter:
f(i,j) = median{g(i+m,j+n): (m,n) in
mask}
Eg: 2x2 masks. Mask origin (1,1). ULHC's:
0 4 4 5 4 ... 1 3 4
4 ... 0 4 4 4 ...
0 0 4 4 4 ... 0 1 3 4
... 0 0 4 4 ...
0 0 0 4 4 ... 0 0 1 3
... 0 0 0 4 ...
0 1 0 0 4 ... 0 0 0 1
... 0 0 0 0 ...
0 0 0 0 0 ...
......... .........
...........
original
mean
median
Here is the noisy checkerboard image filtered using a
10x10 median filter. Note the edges are
very well
preserved, much better than either the
Gaussian or
averaging filters of the same size. The
noise reduction
is somewhere between the averaging and
Gaussian filters
of the same size.
Homomorphic filters: idea is to take average over
the mask of some nonlinear invertible function u()
of g(i,j), then invert.
Eg: u=log(g), 3x3 mask. Then
f(i,j) = exp{1/9 (sum (m,n) of
log(g(i+m,j+n)))}
Homomorphic filters have some nice advantages, for
instance can do geometric mean and dB
averaging.
Edge detectors
An edge is defined as a region of rapid variation
in graylevel surrounded by regions of lower variation.
Edges in continuous
images f(x,y) are
characterized by two
related properties:
1. A local max in the magnitude of the gradient
|[ δf/δx δf/δy ]T|
2. Zero crossing of the Laplacian
δ2f/δx2 + δ2f/δy2 = 0
In 1D here is what these conditions look like:
Most edge detection and enhancement filters work by
approximating first and second partial derivatives,
then looking for (i,j) that satisfy these
conditions.
Discrete approximations to partial derivatives
The first class of edge operators we will look at
estimate the magnitude of the gradient vector. Note
magnitude can be defined as Euclidean, sum of
abolute components (partials) or max
component.
Roberts operator: convolve with [1 0; 0 -1], take
absolute value. Convolve again with [0 1; -1 0]
take absolute value. Add the two.
Eg: Origin of mask = (1,1)
0 0 0 1 0
... 0 -1 -1 1 ... 0 0 0 -1 ...
0 0 1 1 0
... -1 -1 0 1 ... 0 0 0 -1 ...
0 1 1 1 0
... -1 0 0 1 ... 0 0 0
-1 ...
1 1 1 1 0
... ............
............
.........
Original First
conv Second conv
0
1
1
2
...
1
1
0
2
...
1
0
0
2
...
..............
Result
Compass-directions
based methods: It can be shown
that the magnitude of the gradient is the
same as
the magnitude of the maximum directional
derivative.
These methods proceed by computing the directional
derivatives in the major compass directions, then
take largest. As a bonus you get the edge direction
as well as the edge strength.
Eg: Prewitt: hN = 1
1
1 , hNE = 0 1 1 , etc.
0
0
0
-1
0
1
-1
-1
-1
-1
-1
0
For each of the 8 principal compass directions
we get a directional
gradient magnitude.
There are several other compass-directions based
methods diffell in size of mask, number of dir-
ections, and mask weights (Sobel, Robinson
etc.).
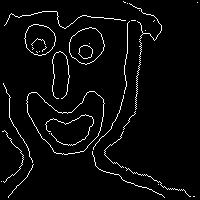
Example: image colors.jpg converted to
graylevel
using
>> Im = imread('colors.jpg','jpg');
>> Im = rgb2gray(Im);
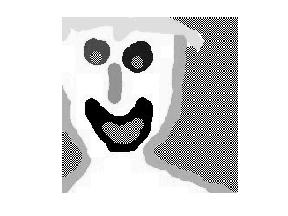
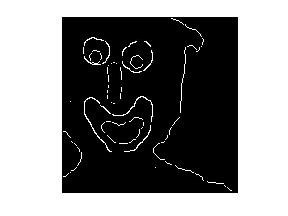
Image Im
Roberts
Prewitt
Sobel
Note that while they all found the most important edges,
there are breaks in the continuous edges and none found
the hairline edge or inner face edge.
The next class of edge operators looks for zero-
crossings of the second derivative
(Laplacian).
=
g(i,j)-2g(i-1,j)+g(i-2,j)+g(i,j)-2g(i,j-1)+g(i,j-2)
which corresponds to the convolution
mask 0 0 +1
0
0
-2
+1
-2
+2
where the pixel being recalculated (pixel
(i,j) in
the equation above) is the lower right hand
corner pixel
of the mask, ie. the mask origin is (3,3).
Problem with applying this mask directly, or any other
mask approximating the Laplacian operator, is that
differentiation enhances noise.
Eg: ...................
...................
...................
...................
.. 0 0 0
0 0 0 .. 0 0 0 0 0 0
.. 0 0
0 0 0 0 .. 0 0 0
0 0 0
.. 0 0
1 0 0 0 .. 0 0 +2 -2 +1 0
.. 0 0
0 0 0 0 .. 0 0 -2 0 0 0
.. 0 0
0 1 0 0 .. 0 0 +1 +2 -2 +1
.. 0
0 0 0 0 0
.. 0 0
0 -2 0 0
LRHC
of image After Lap convolution
A small amount of noise in the original
image has
created a considerably larger amount after
the Laplacian
filter mask has been applied. How to
minimize this?
The trick is to first smooth out the noise before est-
imating the Laplacian. Usually, that is
done by Gaussian
smoothing resulting in the Laplacian of
Gaussian LoG:

For typical values of sigma, the mask size
for the LoG
mask can be high, thus the LoG operation slow and
heavily bordered. It can be shown that the LoG operator
can be well approximated by a Difference of Gaussians
(DoG), where the variances are distinct.
Difference of Gaussians (DoG):

In using a zero-crossing method, a final step is to
locate the detected zero-crossings in the filtered image.
Let (i,j) be designated a zero-crossing if a 2x2 mask
with its origin at (i,j) has filtered image
values of
both signs in it.
To make identification more robust, can add
requirement
that the absolute values exceed a threshold. Or even
better, that magnitude of the gradient (computed
independently) at (i,j) exceed a threshold.
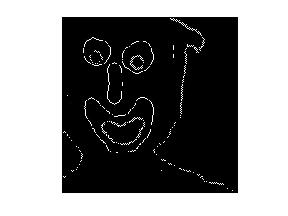
Canny edge detector
This method is generally considered the most powerful
of the available edge detectors. Using ideas from
signal detection theory, for a given mask origin
(i,j) first step is to find the best ms
edge model,
i.e. perform optimal
combined edge detection and
localization in the
mean-square sense (minimum of
sum-squared errors) using an ideal edge
model.
In 1-D, this looks like:
In 2-D we can fit an edge of any amplitude
|f2-f1|
and any angle within the mask.
Eg.:
If an edge is declared to have been found (|f2-f1| is
large enough) this step declares (i,j) to be an edge
pixel and returns a goodness of fit
(confidence) measure
SNR =
|f2-f1|/sqrt(mserror)
"Large enough"
can be defined either by a numeric
treshold on |f2-f1|, or
better, by a numeric threshold
on the SNR.
Second step is to bind together or
eliminate small
broken
edges. This is done with the help of two thresholds,
a high one th and low one tl. If (i,j) is
not connected to
a "strong edge
pixel" (m,n), one such that SNR(m,n)>th,
then
apply th to (i,j),
otherwise apply tl.
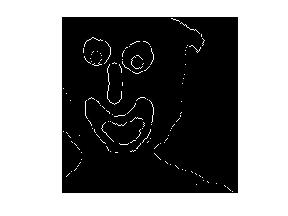
Eg: Note that hairline and interior face
edges ok.
Other edge detectors are briefly described in the
text, parametric edge models and multispectral
edge detectors. Please read all assigned material,
in class we will only discuss the more important
material.
Line detectors
In some images lines as opposed to edges are
important. A line is a long thin connected region
whose crossectional width is constant.
If we assume the lines to be white lines one pixel
wide, we can use a compass set of masks like
0 0 0 0
0 0 0 0 0 0
0 -1 2 -1
0 0 0 -1 2 1
0 -1 2 -1 0 , 0
-1 2 -1 0 , etc.
0 -1 2 -1 0
-1 2 -1 0 0
0 0 0 0
0 0 0 0 0 0
Each one is a matched filter which is matched to a
line segment of specific length oriented in
a specific
direction. A matched
filter
is a mask identical to an
object we seek, when it is over that object
the filter
output will be high.
Dynamic mask
selection
schemes
All methods discussed so far assume that the
mask size and shape are selected in advance and
not varied as the mask moves across the image.
Better performace can often be had by varying
the mask depending on the data under it. The
price is higher
complexity, slower execution.
Adaptive smoothing: for each pixel (i,j),
build a region outward by connected pixels
as long as |f(k,l)-f(i,j)|<=T1. Then apply
a smoothing
filter with that as its mask.
Adaptive histogram equalization: as above,
build homogeneous regions. Then do histogram
equalization
separately on each region.
Eg:
Original
Histogram-equalized
Adaptive
Histogram-equalized
Other dynamic mask selection schemes such as contrast
enhancement are described in the text. Adaptive equal-
ization and smooting are the most
important,
though.
Final note: you are not responsible for Section 4.4
on image
restoration techniques.