RTS: Scheduling Period Tasks
RTS: Clock-driven Scheduling
Announcements: Codecon for the course is set up and ready to go.
NOTE: We started this lecture on 16th Sept., we will finish it with a realtime scheduling for the problem on the right.
Consider a set of N period tasks. Your goal is to design a cyclic executive for the N tasks. A periodic task is denoted by {tai, ei ,pi, Di} where the attributes are arrival time, execution time, period and relative deadline for task i For example {0, 5, 12, 7} means
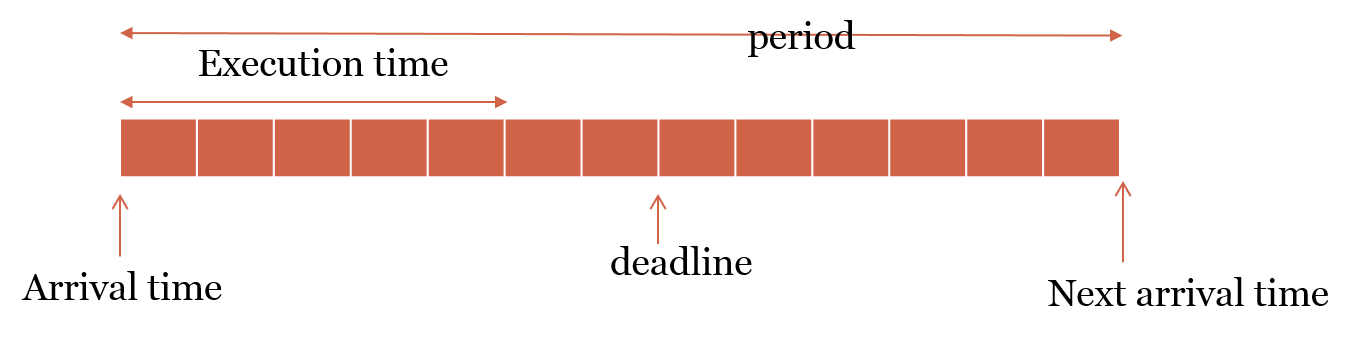
How will the timing diagram be for {1, 5, 12, 7} and for {0, 5,12, 12}? Lets discuss.
Problem Statement: n periodic tasks with {tai, ei ,pi, Di} with i = 1..n need to be scheduled. Since the four parameters known ahead the scheduling is static and a cyclic executive can be designed to schedule (& execute) the tasks so that they meet their respective deadlines.
Rules for designing a cyclic executive
- Utilization U = ∑ (ei/pi) if utilization U>1, the tasks cannot be scheduled in the same processor.
- If U is okay,
Hyperperiod H is lcm (pi) + these constraints
- Frame f ≥ max(ei)
- Frame f should evenly divide H.
- There should be at least 1 frame between release time of a task and its deadline: 2f – gcd(pi,f) ≤ Di
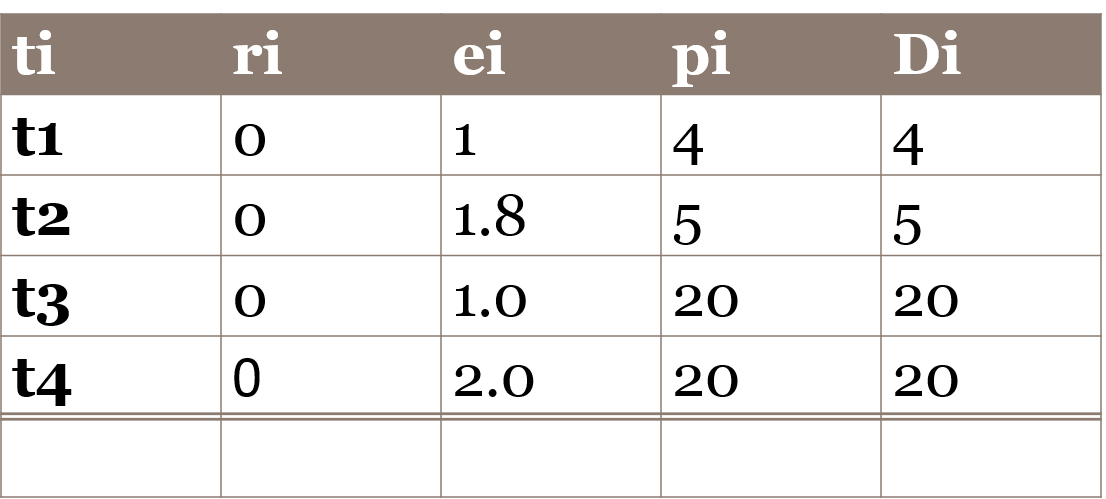
Example: Given the task set on the sidebar design the cyclic executive schedule or clock driven static schedule.
Hmmm.. how do we implement this in code?
Using table-driven (or data-driven) code
Rate monotonic scheduling (RMS)
Periodic tasks are prioritized by the frequency of repetition (high priority to tasks with shorter periods)Preemptive scheduling is commonly used.
Schedulability according to RMS Σ(Ci/Ti) <= n(pow(2,1/n)-1)
Cyclic executives (pre-scheduled)
Clock Scheduling Example
CodeCon Contest