
Jason J. Corso
| Snippets by Topic | |
| * | Active Clustering |
| * | Activity Recognition |
| * | Medical Imaging |
| * | Metric Learning |
| * | Semantic Segmentation |
| * | Video Segmentation |
| * | Video Understanding |
| Selected Project Pages | |
| * | Action Bank |
| * | LIBSVX: Supervoxel Library and Evaluation |
| * | Brain Tumor Segmentation |
| * | CAREER: Generalized Image Understanding |
| * | Summer of Code 2010: The Visual Noun |
| * | ACE: Active Clustering |
| * | ISTARE: Intelligent Spatiotemporal Activity Reasoning Engine |
| * | GBS: Guidance by Semantics |
| * | Semantic Video Summarization |
| Data Sets | |
| * | YouCook |
| * | Chen Xiph.org |
| * | UB/College Park Building Facades |
| Other Information | |
| * | Code/Data Downloads |
| * | List of Grants |
DeforMAT
Interactive Haptic Rendering of Deformable Surfaces
Based on the Medial Axis Transform
Interactive Haptic Rendering of Deformable Surfaces
Based on the Medial Axis Transform
Overview: We have developed a new method for interactive deformation and haptic
rendering of viscoelastic surfaces. Objects are defined by a
discretized Medial Axis Transform (MAT), which consists of an ordered
set of circles (in 2D) or spheres (in 3D) whose centers are connected
by a skeleton. Our implementation, called DeforMAT, is appealing
because it takes advantage of single point haptic interaction to render
efficiently while maintaining a very low memory footprint.
Collaborators: Jatin Chhugani, Allison Okamura
Publication:
| [1] | J. J. Corso, J. Chhugani, and A. Okamura. Interactive Haptic Rendering of Deformable Surfaces Based on the Medial Axis Transform. In Eurohaptics, pages 92-98, 2002. [ bib | .pdf ] |
Discussion: The foundation of our algorithm
is the use of shape skeletons as a basis for the object model. These
shape skeletons are called the medial axis (surface) in 2D (3D). Shown
below is an example of the medial axis of a 2D rectangle.
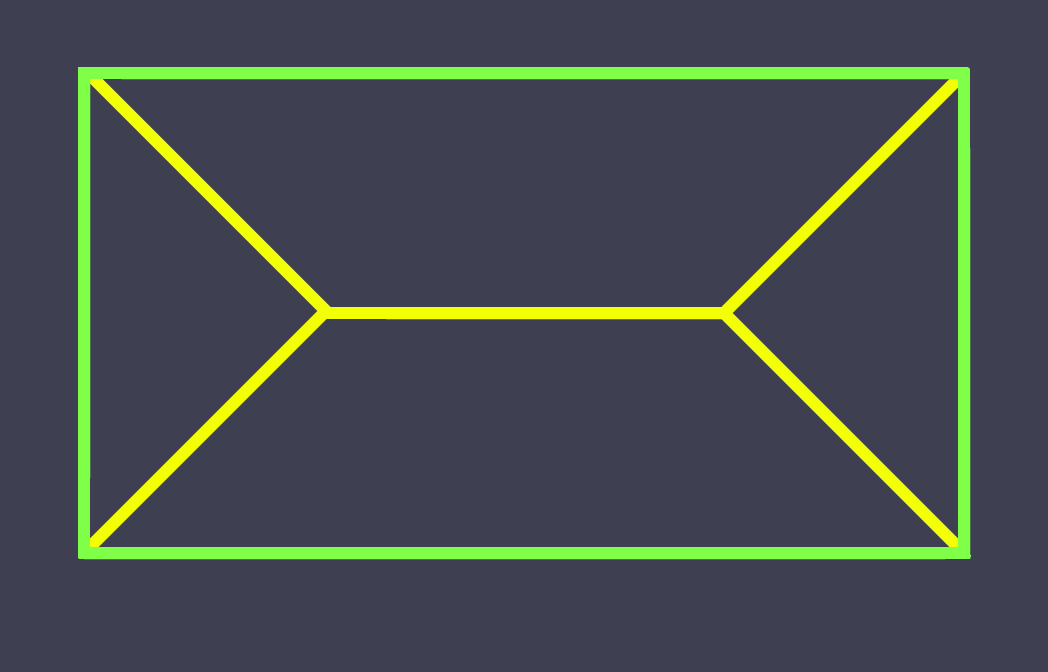 In this diagram the green lines are the actual surface and the yellow
lines are the medial axes.
The Medial Axis Transform (MAT) was originally proposed by Blum (67) as
an alternative shape description for biological applications. It has
recently been used by Pizer at UNC as a multilocal and multiscale
representation for graphic and computer-aided design applications where
the figure is defined by a mesh of medial "atoms." Gagvani, in his
Ph.D. thesis has recently employed skeletonization to automatically
generate the volumetric representation of a polygonal mesh; he explores
the approach for use in volumetric modeling, deformation, and animation.
We propose to employ the MAT as the underlying physical representation
for viscoelastic surfaces. Since the MAT is defined as a skeletal axis
and a set of locally maximal circles centered about the axis, it is an
excellent model for use in single point haptic interaction where the use
of implicit equations is common for efficient force rendering
computation.
In this diagram the green lines are the actual surface and the yellow
lines are the medial axes.
The Medial Axis Transform (MAT) was originally proposed by Blum (67) as
an alternative shape description for biological applications. It has
recently been used by Pizer at UNC as a multilocal and multiscale
representation for graphic and computer-aided design applications where
the figure is defined by a mesh of medial "atoms." Gagvani, in his
Ph.D. thesis has recently employed skeletonization to automatically
generate the volumetric representation of a polygonal mesh; he explores
the approach for use in volumetric modeling, deformation, and animation.
We propose to employ the MAT as the underlying physical representation
for viscoelastic surfaces. Since the MAT is defined as a skeletal axis
and a set of locally maximal circles centered about the axis, it is an
excellent model for use in single point haptic interaction where the use
of implicit equations is common for efficient force rendering
computation.
 As input to our algorithm, a set of MAT points are used to fully
describe the necessary information of the object: position, radius,
surface parameters (stiffness, etc). Through these data point we
interpolate a high-dimensional parametric curve (the dimension of the
curve is equal to the number of parameters, for 2d position and radius
it would be 3 dimensional, for 3d position, radius, and mass it would be
5-dimension). This curve is the skeletal curve (2d) or surface (3d)
against which all haptic interaction and deformation takes place. To
aid in graphic rendering of these surfaces, we then extropolate an
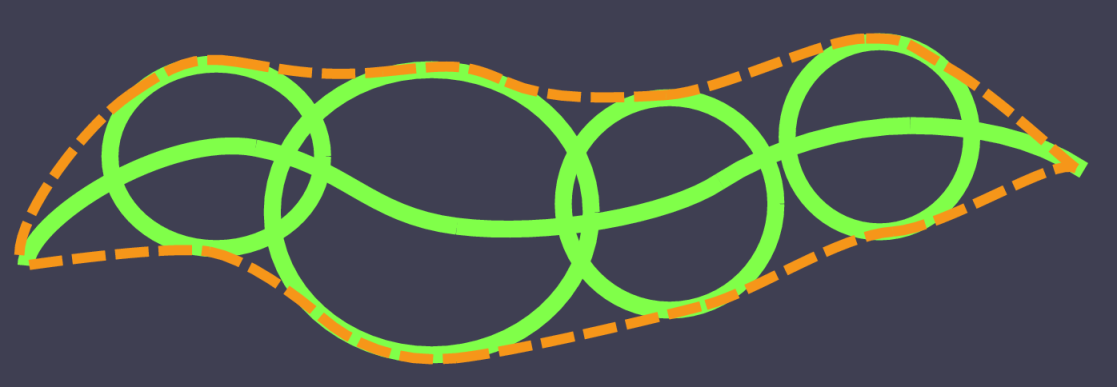
enveloping contour curve. The figure on the right displays these curves
for a simple 2d MAT object. The green circle represent the input MAT
points and the green curve is the medial axis. The dotted orange curve
represents the extrapolated contour of the body.
Some other images from the work are here.
As input to our algorithm, a set of MAT points are used to fully
describe the necessary information of the object: position, radius,
surface parameters (stiffness, etc). Through these data point we
interpolate a high-dimensional parametric curve (the dimension of the
curve is equal to the number of parameters, for 2d position and radius
it would be 3 dimensional, for 3d position, radius, and mass it would be
5-dimension). This curve is the skeletal curve (2d) or surface (3d)
against which all haptic interaction and deformation takes place. To
aid in graphic rendering of these surfaces, we then extropolate an
enveloping contour curve. The figure on the right displays these curves
for a simple 2d MAT object. The green circle represent the input MAT
points and the green curve is the medial axis. The dotted orange curve
represents the extrapolated contour of the body.
Some other images from the work are here.

 For more details about the modeling technique and the interactive
rendering and deformation algorithms please see the paper.
For more details about the modeling technique and the interactive
rendering and deformation algorithms please see the paper.
In this diagram the green lines are the actual surface and the yellow
lines are the medial axes.
The Medial Axis Transform (MAT) was originally proposed by Blum (67) as
an alternative shape description for biological applications. It has
recently been used by Pizer at UNC as a multilocal and multiscale
representation for graphic and computer-aided design applications where
the figure is defined by a mesh of medial "atoms." Gagvani, in his
Ph.D. thesis has recently employed skeletonization to automatically
generate the volumetric representation of a polygonal mesh; he explores
the approach for use in volumetric modeling, deformation, and animation.
We propose to employ the MAT as the underlying physical representation
for viscoelastic surfaces. Since the MAT is defined as a skeletal axis
and a set of locally maximal circles centered about the axis, it is an
excellent model for use in single point haptic interaction where the use
of implicit equations is common for efficient force rendering
computation.
As input to our algorithm, a set of MAT points are used to fully
describe the necessary information of the object: position, radius,
surface parameters (stiffness, etc). Through these data point we
interpolate a high-dimensional parametric curve (the dimension of the
curve is equal to the number of parameters, for 2d position and radius
it would be 3 dimensional, for 3d position, radius, and mass it would be
5-dimension). This curve is the skeletal curve (2d) or surface (3d)
against which all haptic interaction and deformation takes place. To
aid in graphic rendering of these surfaces, we then extropolate an
enveloping contour curve. The figure on the right displays these curves
for a simple 2d MAT object. The green circle represent the input MAT
points and the green curve is the medial axis. The dotted orange curve
represents the extrapolated contour of the body.
Some other images from the work are here.
Other Information:
- A movie describing the method.
- Eurohaptics02 Powerpoint Slides in HTML. Or in ppt.
- Here is a link to the slides for a seminar discussing an introduction to haptics as well as our algorithm.