Table of contents
Sensor Modeling
- Pieter Abbeel
Loop Closure more details
- How to recognize previously visited locations?
- Rich sensor such as camera
- For range finders often have to do sub-mapping
- Single scans are not good enough to reliably determine loop closure
- What to do when a revisit is detected?
- Perform pose graph relaxation
- Distribute the angular and translation displacement error
- Spring model
- Minimise energy of the lattice
- Rat slam
- Mapping a Suburb with a Single Camera using a Biologically Inspired SLAM System
- http://www.youtube.com/watch?v=-0XSUi69Yvs
Pose graph relaxation
Pose graph is a graph of connected poses
- connected by observed relative pose either
- from odometry
- from scan matching
Spring network energy minimisation
Spring energy is \(E = \frac{k_1}{2} x^2 + \frac{k_2}{2} \theta ^2\)
For angular and translational displacements
Energy minimised over the whole network
Estimate position and variance of node i from each neighboring node j:
Andrew Davison SLAM lecture 8
Grid based SLAM
- Pieter Abbeel
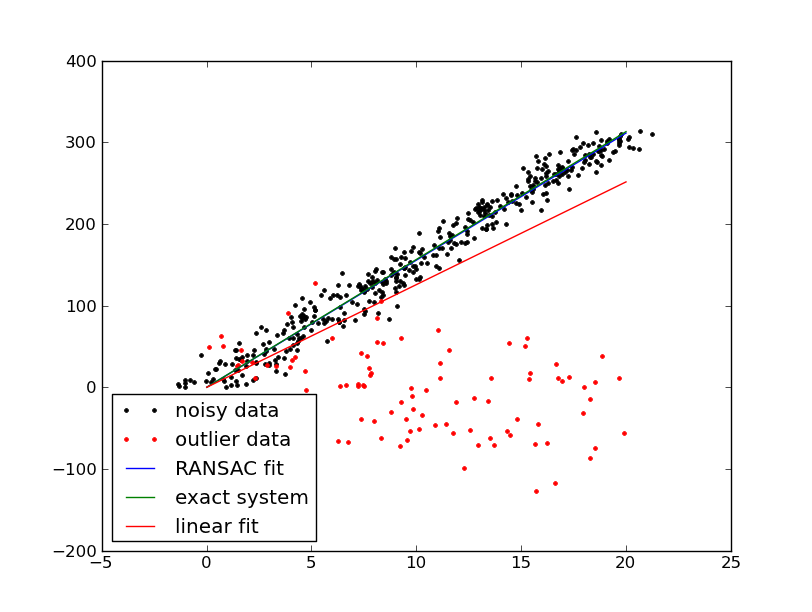
RANdom SAmple Consensus, RANSAC
- Overview
- Iterative method for model parameter estimation
- Good generic goto algorithm
- In real world data outliers are usually possible
- Advantages
- Robust to outliers
- Simple to implement and effective
- Anytime algorithm
- Disadvantages
- Can take a long time
- Requires some parameters
- Number of elements required for a good fit
- Inlier/Outlier distance threshold
- Number of iterations
RANSAC pseudocode
while iterations < k
maybe_inliers := n randomly selected values from data
maybe_model := model parameters fitted to maybe_inliers
consensus_set := maybe_inliers
for every point in data not in maybe_inliers
if point fits maybe_model with an error smaller than t
add point to consensus_set
if the number of elements in consensus_set is > d
(this implies that we may have found a good model,
now test how good it is)
this_model := model parameters fitted to all points in consensus_set
this_error := a measure of how well this_model fits these points
if this_error < best_error
(we have found a model which is better than any of the previous ones,
keep it until a better one is found)
best_model := this_model
best_consensus_set := consensus_set
best_error := this_error
increment iterations