The final exam will be an in-class exam on 4/25 between 12:30 and 1:50pm in the normal classroom.
I just posted Homeworks 4 and 5.
The final project has a progress report due on 4/22/2013. See the project description for details.
I just posted instructions for the final project. You only need to complete a project if you are in the 500 version of the class.
This course will study key algorithms relevant to programming intelligent robots with a focus on the following questions. How might one program a robot to estimate the state of the world based on multiple sources of information? How might a robot create plans or control policies for performing tasks? How might a robot learn a control policy directly from experience? The course will cover topics in estimation, control, and planning with applications to robotics including: reinforcement learning, linear optimal control, randomized motion planning, trajectory optimization, Kalman filtering, particle filtering, and selected topics in optimization.
Timeslot: T/TH 12:30 -- 1:50
Room: 220 NSC
Instructor: Robert Platt
ubit: robplatt
Office: 330 Davis Hall
Office Hours: Tuesday 2:00 -- 3:00pm in 106 Davis Hall
Textbook: None. This course does not require the purchase of a textbook. All course reading material will be taken from sources freely available on the Internet as assigned on syllabus below.
TA: Suchismit Mahapatra
TA email: suchismi@buffalo.edu
TA office hours: Monday and Friday, 2:30 -- 3:30pm in 106 Davis Hall
| Date | Topic | Lecture | Readings | Homework | Optional Readings / Videos |
| 1/15/2012 | Introduction | ||||
| 1/17/2012 | Markov Decision Processes | Blackboard | SB Chapter 3 | Bert Vol 1, Ch 1. Also, check out this video of reinforcement learning operating on a gridworld environment. | |
| 1/22/2012 | Reinforcement Learning | Blackboard | SB Chapter 6 | Bert Vol 1, Ch 1. Here is a Java applet that illustrates q-learning in a very simple gridworld environment. This one illustrates reinforcement learning applied to the inverted pendulum task. This one illustrates value iteration. | |
| 1/24/2012 | Linear Algebra Review (TA) | I'll be out of town this day. The TA will review linear algebra and answer questions as needed. This class is optional. | |||
| 1/29/2012 | Value Iteration | Blackboard | SB Chapter 4 | Bert Vol 1, Ch 1. Here is a Java applet that illustrates q-learning in a very simple gridworld environment. This one illustrates reinforcement learning applied to the inverted pendulum task. This one illustrates value iteration. | |
| 1/31/2012 | Value Iteration | Blackboard | SB Chapter 4 | Bert Vol 1, Ch 1. Here is a Java applet that illustrates q-learning in a very simple gridworld environment. This one illustrates reinforcement learning applied to the inverted pendulum task. This one illustrates value iteration. | |
| 2/5/2012 | Reinforcement Learning | Blackboard | SB Chapter 4 | ||
| 2/7/2012 | Reinforcement Learning | Blackboard | SB Chapter 4 | ||
| 2/11/2012 | Homework 1 | ||||
| 2/12/2012 | LQR | Blackboard | Intro to LQR. Also, see the wikipedia page on the pseudoinverse. | ||
| 2/14/2012 | LQR | Blackboard | Intro to LQR | This video illustrates the application of LQR to the cart pole balancing problem. | |
| 2/19/2012 | LQR | Blackboard | Intro to LQR | This video illustrates the application of LQR to the cart pole balancing problem. | |
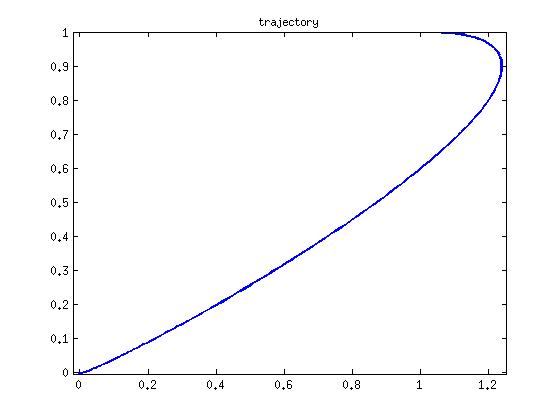
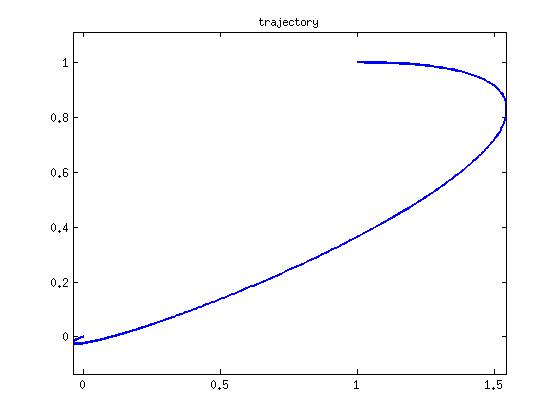
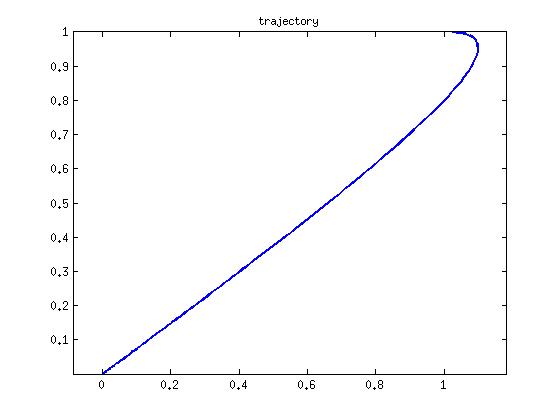
| 2/19/2012 | LQR | Blackboard | Intro to LQR | I wrote a short matlab program to illustrate LQR for the two-dimensional infinite horizon double-integrator system with parameters: m=1, b=0.1. Here is the trajectory followed (position coordinates only) when Q=1*eye(4), B=1*eye(2). Here is the trajectory followed when Q=0.1*eye(4), B=1*eye(2). Here is the trajectory followed when Q=10*eye(4), B=1*eye(2). | |
| 2/21/2012 | More LQR! | Blackboard | Intro to LQR | Here's a video of a glider perching on a power line. The glider is cotnrolled using TVLQR (time varying LQR). | |
| 3/5/2013 | PRM, RRT | Blackboard | Lavalle paper, Wikipedia article. | Here's a video of RRT doing it's thing. Here is a robot arm trajectory generated by RRT. | |
| 3/7/2013 | PRM, RRT | Blackboard | Lavalle paper, Wikipedia article. | Here's a video of RRT doing it's thing. Here is a robot arm trajectory generated by RRT. For more detail, see sections 5.5 and 5.6 of LaValle's comprehensive book. | |
| 3/11/2012 | Homework 2 | ||||
| 3/12/2012 | Spring Break! | ||||
| 3/14/2012 | Spring Break! | ||||
| 3/19/2012 | SLAM, ICP | Guest Lecture, Julian Ryde | Julian's Slides | ||
| 3/21/2012 | RRT | Blackboard | For more detail, see sections 5.5 and 5.6 of LaValle's comprehensive book. | ||
| 3/26/2012 | Search | Blackboard | Wikipedia page on A-Star | For more detail, see section 2.2 of LaValle's comprehensive book. | |
| 3/28/2012 | Sequential Bayes Filtering | Blackboard | |||
| 4/2/2012 | Sequential Bayes Filtering | Blackboard | See the wikipedia article. | Illustration of particle filtering (with narration by Sebastian Thrun). | |
| 4/5/2012 | Homework 3 | ||||
| 4/9/2012 | Particle Filtering | Blackboard | See the wikipedia article. | I thought that this tutorial did a good job covering the more technical aspects of particle filtering (see Sect 4 for the SIR version of partcile filtering on which we have focused in class). | |
| 4/11/2012 | Particle Filtering | Blackboard | See the wikipedia article. | I thought that this tutorial did a good job covering the more technical aspects of particle filtering (see Sect 4 for the SIR version of partcile filtering on which we have focused in class). | |
| 4/16/2012 | Kalman Filtering | Blackboard | See the wikipedia article. | This article does a good job introducting the more technical aspects of Kalman filtering. Simple KF example here. Application of Kalman filtering to IMU tracking and color tracking. Thrun's SEIF paper. EKF slam image. | |
| 4/18/2012 | Kalman Filtering, EKF-SLAM | Blackboard | See the wikipedia article. | Thrun's SEIF paper. EKF slam image. | |
| 4/22/2012 | Homework 4 | ||||
| 4/25/2012 | Final Exam | This will be an in-class exam held in the normal classroom and the normal time. | |||
| 5/2/2012 | Homework 5 |
Instructions for the final course project are given here. The project is due on the last day of exam period.
Our TA, Suchismit Mahapatra, has put together helpful instructions on how to access the UB file system here.
This course has a discussion forum on Piazza here.
Homeworks are due on the date where they appear in the syllabus.
Matlab Access: Our TA, Suchismit Mahapatra, has put together some helpful instructions here on how to access Matlab over the UB campus network.
Key to Readings:
Standford EECS, Advanced Robotics
RPI CS, Robotics II
{kind=link}
{kind=link}
{kind=link}
{kind=link}